Implemented
Marking
Pan-tilt head with a green laser — transfers points from the model onto the site. The current demonstrator.
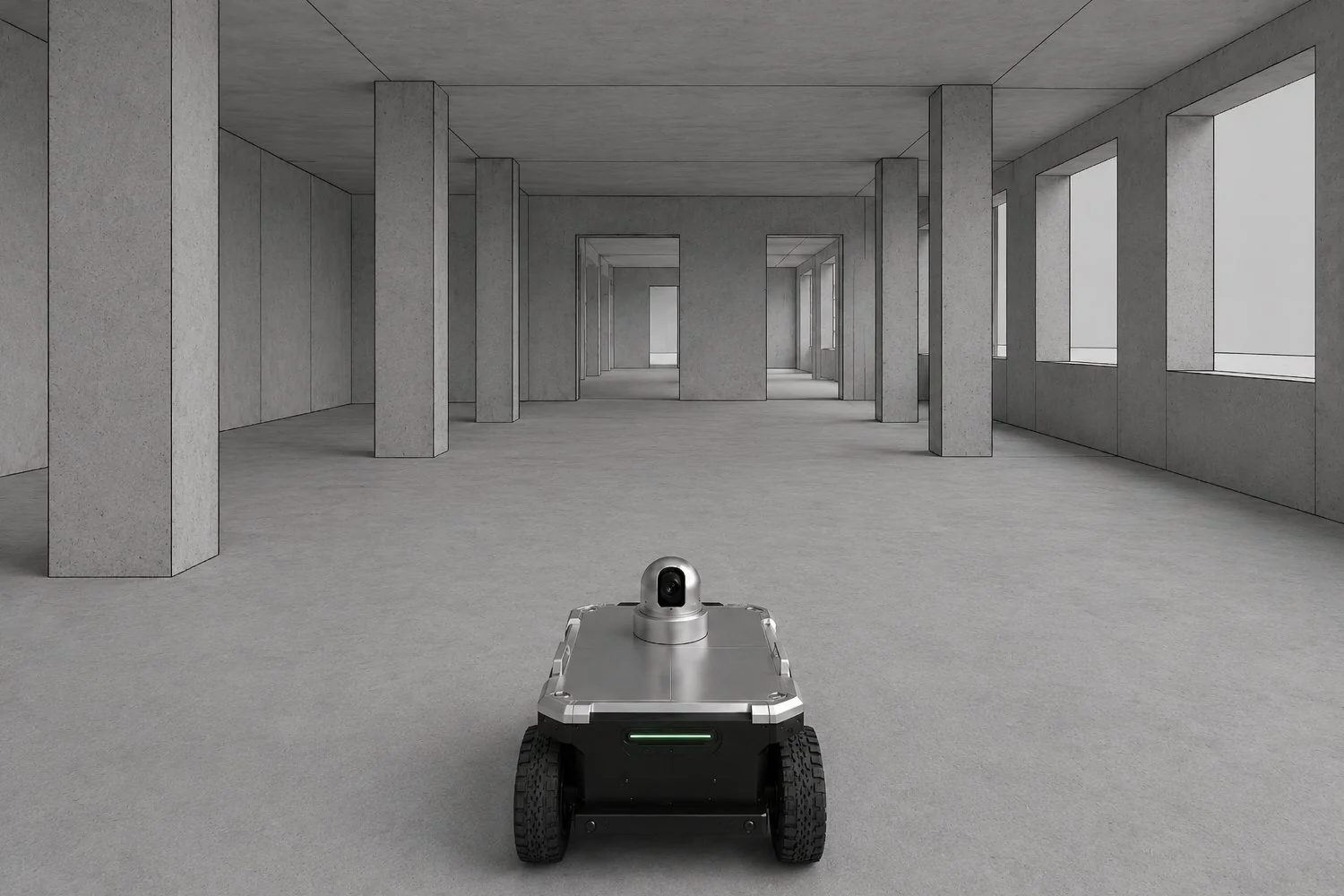
Platform · PRALEX Chassis
The modular base of PRALEX: a chassis with a shared navigation module on which different tasks build — marking, carrying, surveying. Third parties mount their tools via standardised interfaces.
Platform · in development

Modules
Chassis, power, safety and navigation stay the same — only the attachment on top is swapped. Marking is implemented; further roles are planned or in concept.
Implemented
Pan-tilt head with a green laser — transfers points from the model onto the site. The current demonstrator.
Planned
Carries tools and material behind the worker and keeps its distance.
Concept
A total station on the same chassis — for measuring and checking.
Dedicated pages: Marking robot · Follow-me robot · Transport robot (larger, separate platform).
Navigation
Every robot shares the same navigation module: 3D LIDAR, laser distance sensor and an AI camera. They determine the position based on the BIM model in two steps: first a coarse positioning, then a fine positioning.
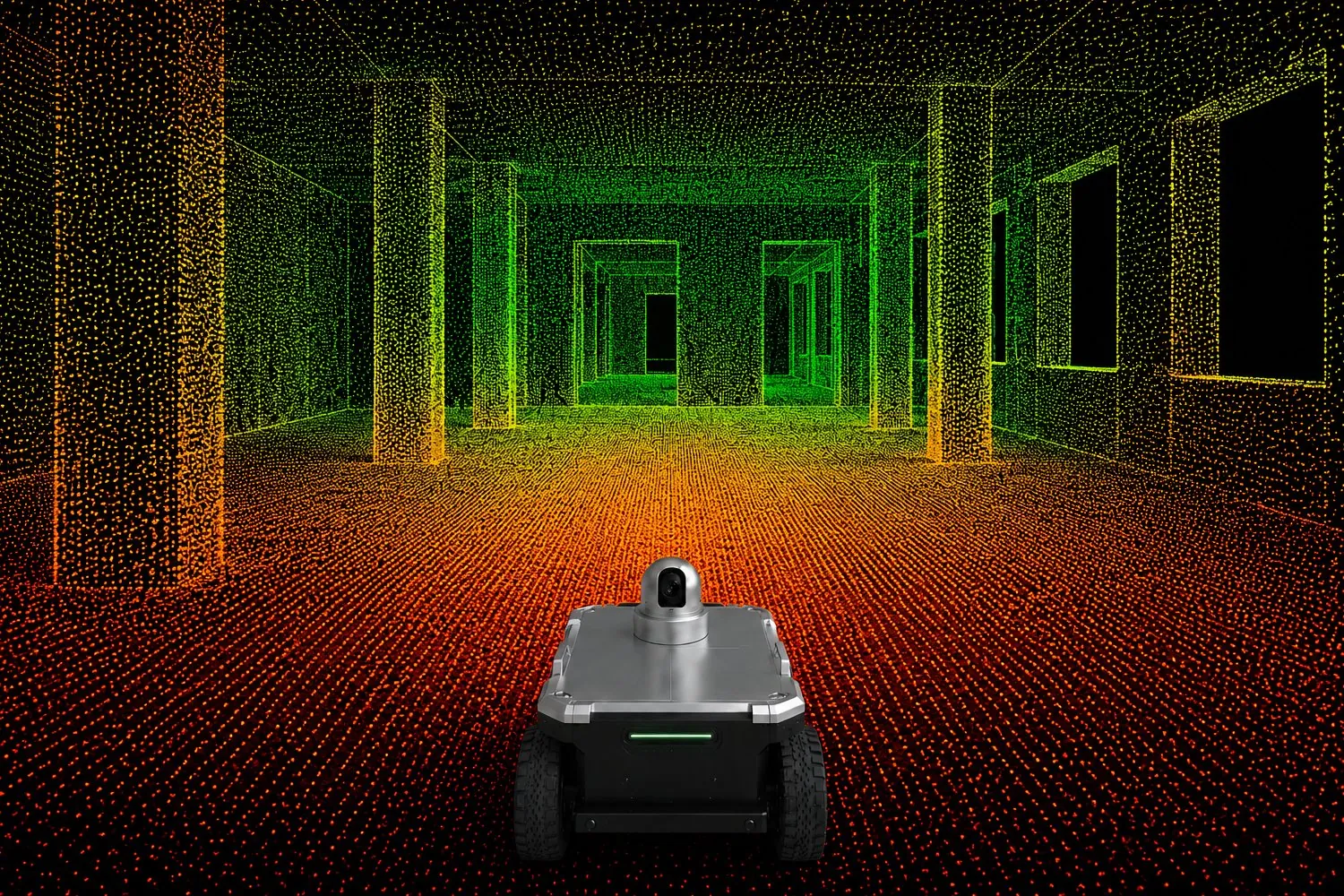
3D LIDAR
Scans the surroundings in three dimensions and aligns them with the BIM model (SLAM) — so the robot knows roughly where in the room it stands.
Laser distance sensor
Measures the distances to the walls — this gives the fine position for marking.
AI camera
Detects which components actually exist yet — the robot aligns only against what is built, not against walls that aren't there yet.
First the BIM model is loaded as a map — the robot doesn't map, it only localises within it. In coarse positioning the 3D LIDAR determines the approximate position, and the AI camera filters out what isn't built yet. In fine positioning the laser distance sensor measures to the walls. That turns the coarse position into a fine one.
Fitted on the current prototype: the 3D LIDAR. The laser distance sensor and AI camera are in development or concept.
Part of the whole
The PRALEX Chassis is the shared base — the individual robots build on it, and via the Robotic Construction Format and PRALEX Link it connects to the rest of the ecosystem.